

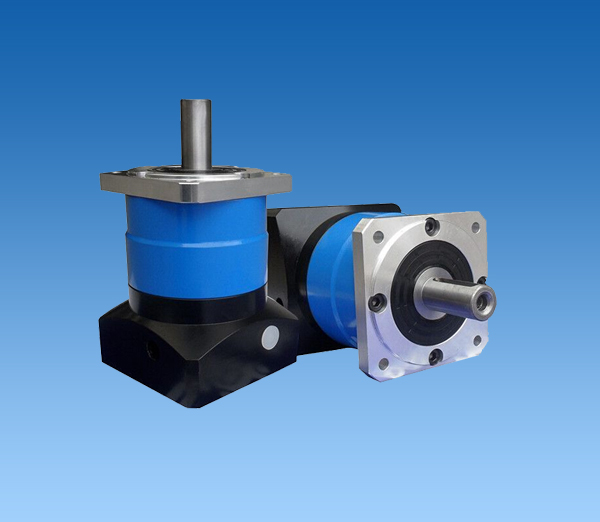
產品概述: 上海諾廣減速機廠生產 S系列斜齒輪蝸輪蝸桿減速

產品特點:
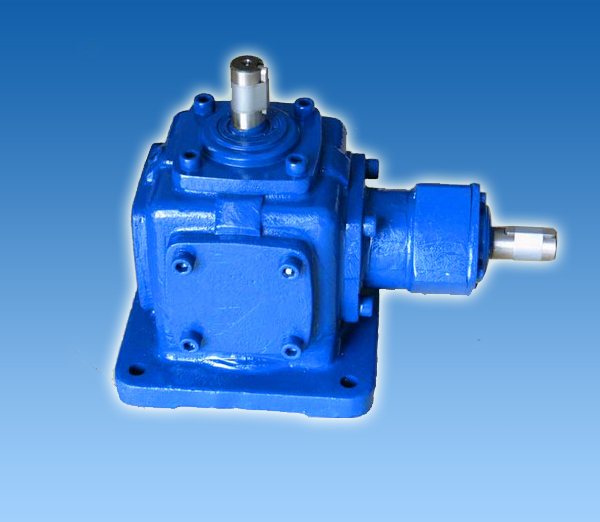
T螺旋錐齒輪換向器產品特點: &
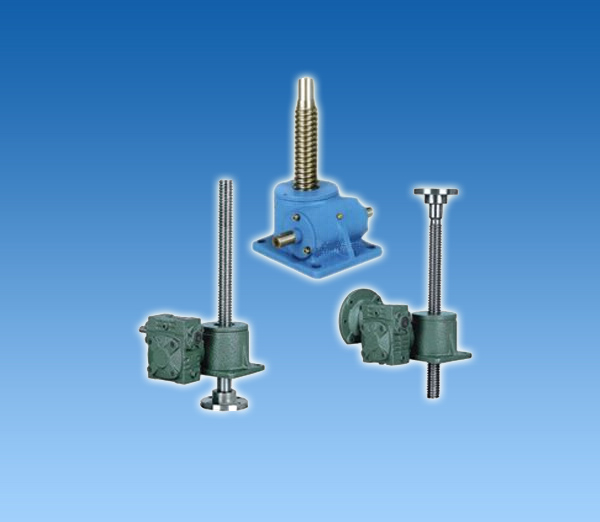
產品特點: 上海諾廣減速機廠生產 SWL絲桿升降機

使用范圍:
產品說明: 1、按輸出方向分主要有兩種:直線
我們在使用齒輪減速機的過程中可以發現它的使用方法并不是很難,一般大家在短時間之內就可以掌握它的使用操作方法。但是這并不代表齒輪減速機是一種簡單的設備,它還有很多知識是等著大家去主動了解的。
從日常中的使用情況可以看出,機器人的關節處安裝了電機和齒輪減速機,最為主要的作用就是對關節的運動進行控制。然后問題出現了:在系統里面,為何伺服電機的轉速無法做到直接旋轉來控制關節的運動,為什么需要齒輪減速機?要回答這個問題,首先要確定工業機器人關節的工作條件。
工業機器人關節的工作條件、工業機器人的關節需要支撐后端機構中由重力產生的扭矩。工業機器人關節速度不高。機器人關節角速度很低,但電機在很低的速度下旋轉不穩定,控制不容易,需要一臺機器使電機以合理的速度移動,以確保平穩移動。
采用齒輪減速機有兩個原因,一是提高了轉矩,二是提高了控制精度和閉環精度。提高閉環精度,改善控制回路:由于減速機的減速比為50:1,減速機的輸出軸受到干擾,傳遞到電機端比直接驅動少分貝,使得齒輪減速機的輸出軸閉環精度顯得更高。同時,控制回路的滯后環節以轉子的轉動慣量為主。轉子直接由電磁力驅動,不產生由剛度引起的轉矩滯后,控制優于直接驅動。
用更便宜的齒輪減速機獲得更高的分辨率:一個普通的5K線光電碼盤可以達到1.44mdeg的角分辨率(當然,如果在正弦余弦編碼器細分上花費太多的錢也可以實現)。高分辨率的優點是使得產生的高頻分量變小。
所以,正是因為如此,齒輪減速機才會替代電機轉速對機器人關節運動進行控制,而事實表明帶來的效果是非常好的。
以上就是關于齒輪減速機的行業分享,希望大家能夠喜歡。
更多關于齒輪加工、渦輪蝸桿加工,敬請關注我們,隨時掌握行業新動態!
上一篇:齒輪減速機承載能力分析
下一篇:齒輪減速機性能調整分析


在線客服1:
在線客服2:
商務客服:
服務時間:
9:00-18:00(工作日)


