

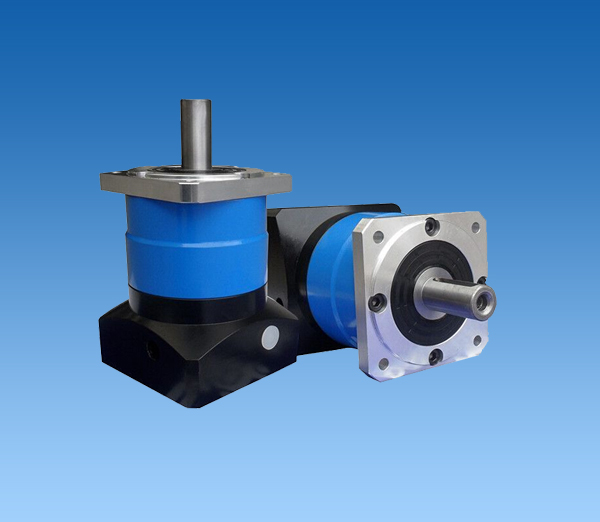
產(chǎn)品概述: 上海諾廣減速機(jī)廠生產(chǎn) S系列斜齒輪蝸輪蝸桿減速

產(chǎn)品特點:
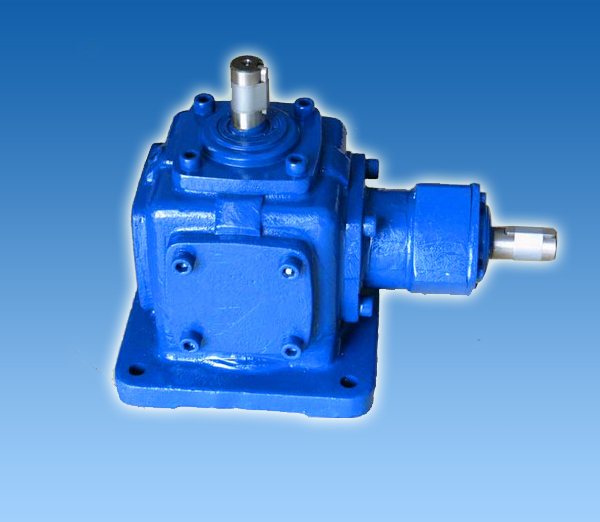
T螺旋錐齒輪換向器產(chǎn)品特點: &
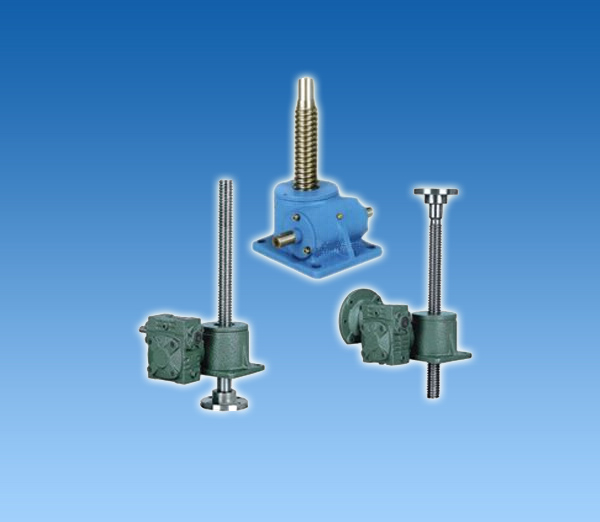
產(chǎn)品特點: 上海諾廣減速機(jī)廠生產(chǎn) SWL絲桿升降機(jī)

使用范圍:
產(chǎn)品說明: 1、按輸出方向分主要有兩種:直線
蝸輪及蝸桿機(jī)構(gòu)的特點
1.可以得到很大的傳動比,比交錯軸斜齒輪機(jī)構(gòu)緊湊
2.兩輪嚙合齒面間為線接觸,其承載能力大大高于交錯軸斜齒輪機(jī)構(gòu)
3.蝸桿傳動相當(dāng)于螺旋傳動,為多齒嚙合傳動,故傳動平穩(wěn)、噪音很小
4.具有自鎖性。當(dāng)蝸桿的導(dǎo)程角小于嚙合輪齒間的當(dāng)量摩擦角時,機(jī)構(gòu)具有自鎖性,可實現(xiàn)反向自鎖,即只能由蝸桿帶動蝸輪,而不能由蝸輪帶動蝸桿。如在其重機(jī)械中使用的自鎖蝸桿機(jī)構(gòu),其反向自鎖性可起安全保護(hù)作用。
5.傳動效率較低,磨損較嚴(yán)重。蝸輪蝸桿嚙合傳動時,嚙合輪齒間的相對滑動速度大,故摩擦損耗大、效率低。另一方面,相對滑動速度大使齒面磨損嚴(yán)重、發(fā)熱嚴(yán)重,為了散熱和減小磨損,常采用價格較為昂貴的減摩性與抗磨性較好的材料及良好的潤滑裝置,因而成本較高
6.蝸桿軸向力較大 應(yīng)用 蝸輪及蝸桿機(jī)構(gòu)常被用于兩軸交錯、傳動比大、傳動功率不大或間歇工作的場合。

蝸輪蝸桿大致有這些系列:
1、WH系列蝸輪蝸桿減速機(jī):WHT/WHX/WHS/WHC
2、CW系列蝸輪蝸桿減速機(jī):CWU/CWS/CWO
3、WP系列蝸輪蝸桿減速機(jī):WPA/WPS/WPW/WPE/WPZ/WPD
4、RV系列鋁合金蝸輪蝸桿減速機(jī):NMRV/NRV
蝸輪蝸桿正確嚙合的條件蝸輪蝸桿正確嚙合的條件蝸輪蝸桿正確嚙合的條件蝸輪蝸桿正確嚙合的條件 1.中間平面內(nèi)蝸桿與蝸輪的模數(shù)和壓力角分別相等,即蝸輪的端面模數(shù)等于蝸桿的軸面模數(shù)且為標(biāo)準(zhǔn)值;蝸輪的端面壓力角應(yīng)等于蝸桿的軸面壓力角且為標(biāo)準(zhǔn)值,即 ==m ,== 2.當(dāng)蝸輪蝸桿的交錯角為時,還需保證,而且蝸輪與蝸桿螺旋線旋向必須相同。

幾何尺寸計算與圓柱齒輪基本相同,需注意的幾個問題 1.蝸桿導(dǎo)程角()是蝸桿分度圓柱上螺旋線的切線與蝸桿端面之間的夾角,與螺桿螺旋角的關(guān)系為,蝸輪的螺旋角,大則傳動效率高,當(dāng)小于嚙合齒間當(dāng)量摩擦角時,機(jī)構(gòu)自鎖。2.引入蝸桿直徑系數(shù)q是為了限制蝸輪滾刀的數(shù)目,使蝸桿分度圓直徑進(jìn)行了標(biāo)準(zhǔn)化m一定時,q大則大,蝸桿軸的剛度及強(qiáng)度相應(yīng)增大;一定時,q小則導(dǎo)程角增大,傳動效率相應(yīng)提高。3.蝸桿頭數(shù)推薦值為1、2、4、6,當(dāng)取小值時,其傳動比大,且具有自鎖性;當(dāng)取大值時,傳動效率高與圓柱齒輪傳動不同,蝸桿蝸輪機(jī)構(gòu)傳動比不等于,而是,蝸桿蝸輪機(jī)構(gòu)的中心距不等于,而是。4.蝸桿蝸輪傳動中蝸輪轉(zhuǎn)向的判定方法,可根據(jù)嚙合點K處方向、方向(平行于螺旋線的切線)及應(yīng)垂直于蝸輪軸線畫速度矢量三角形來判定;也可用“右旋蝸桿:左手握,左旋蝸桿右手握,四指拇指”來判定。
上海諾廣減速機(jī)更多相關(guān)MB/JXB無級變速機(jī)、R/RF斜齒輪硬齒面減速機(jī)、JWM/SWL絲桿升降機(jī)、K螺旋錐齒輪減速機(jī)、S斜齒輪-蝸桿減速機(jī)、R斜齒輪硬齒面減速機(jī)、F平行軸斜齒輪減速機(jī)、WB/XB微型擺線針輪減速機(jī)、ARA/齒輪換向器、T/SPL齒輪轉(zhuǎn)向箱、RV/WP蝸輪蝸桿減速機(jī)、WJ蝸輪箱、G齒輪馬達(dá)、P精密行星減速機(jī)參數(shù)請聯(lián)系上海諾廣公司,我們將為你提供完美的服務(wù)。本公司還提供公、英制齒輪加工、蝸輪蝸桿配件、(傘齒輪、直齒輪、鏈輪鏈條、螺旋傘齒輪、錐齒輪)等配件加工。另外想要了解更多內(nèi)容關(guān)注公司官網(wǎng):http://www.tjdqht.com/wljsj/w236.html,也可以直接電話咨詢。


在線客服1:
在線客服2:
商務(wù)客服:
服務(wù)時間:
9:00-18:00(工作日)


